Publications
A collection of my research work.
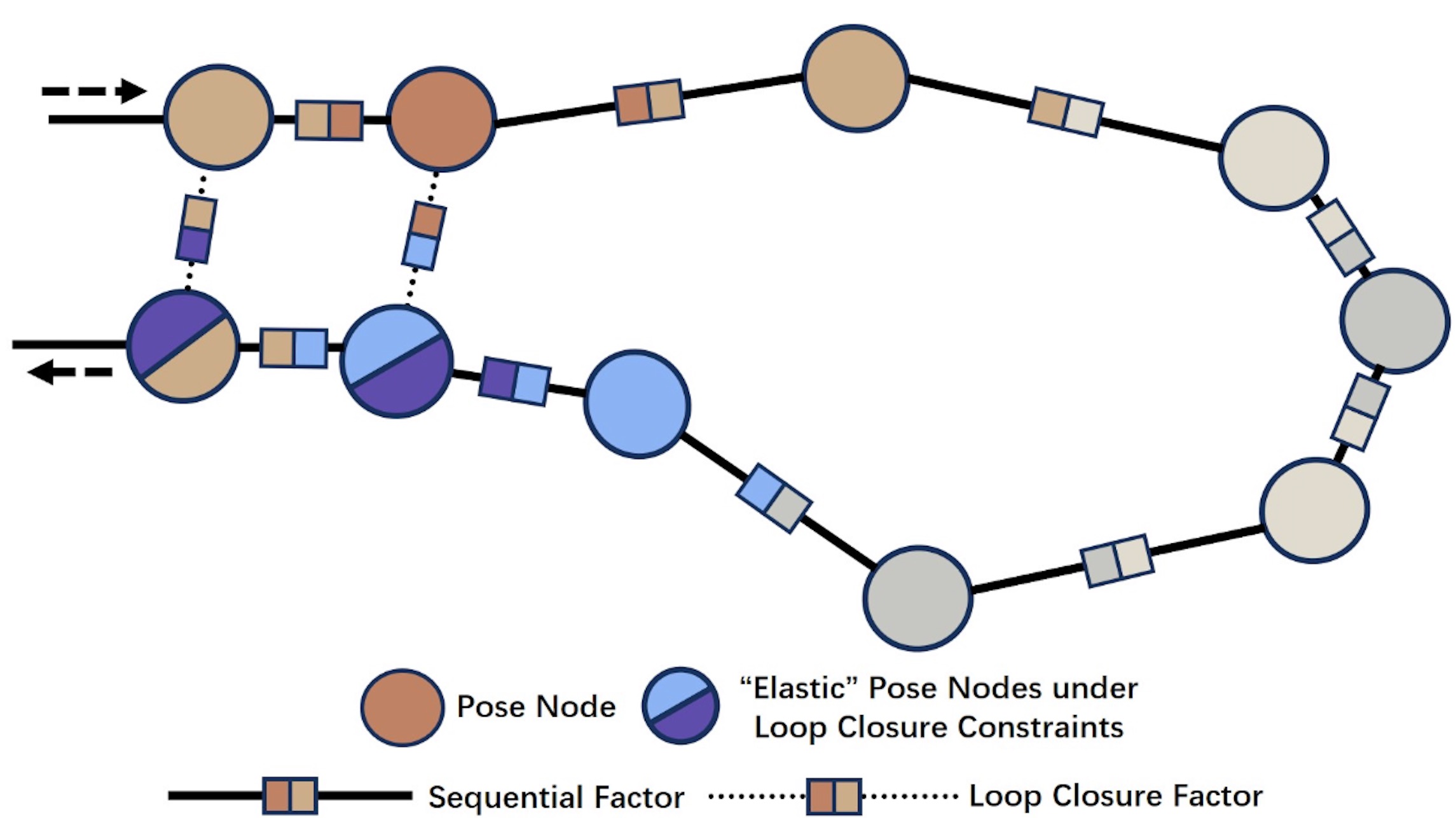
UAPGO: Uncertainty-Aware Pose Graph Optimization for LiDAR-Based SLAM Systems
Tian Zhi, Jie Xu (Co-first), Yongxin Ma, Wenlu Yu, Shenglan Liu, Shenghai Yuan
Yongxin and Yu, Wenlu and Liu, Shenglan and Yuan, Shenghai, Uapgo: Uncertainty-Aware Pose Graph Optimization for Lidar-Based Slam Systems 2026
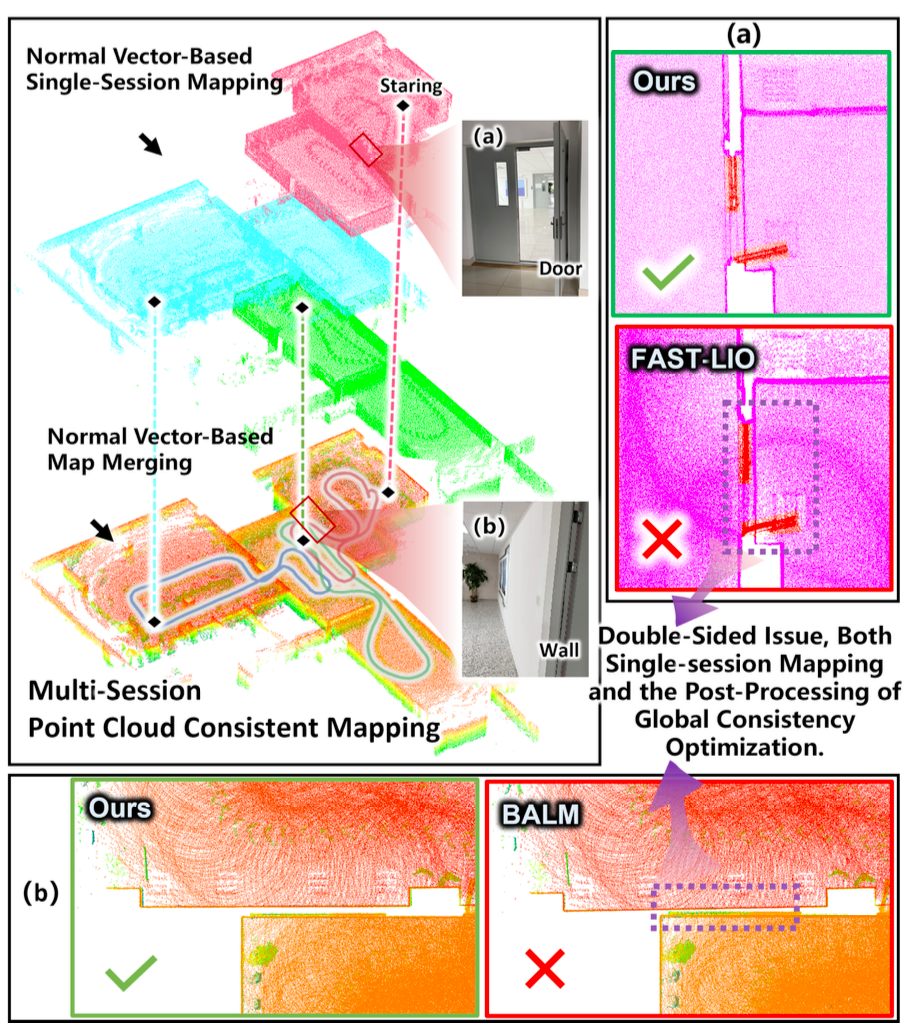
NVMS-SLAM: Normal Vector-based Multi-Session LiDAR SLAM in Indoor Environments
Yongxin Ma, Chengwei Zhao, Jie Xu (Corresponding), Yixuan Li, Xuanxuan Zhang, Shenghai Yuan, Lihua Xie
IEEE Transactions on Automation Science and Engineering 2026
Early Access on IEEE Xplore
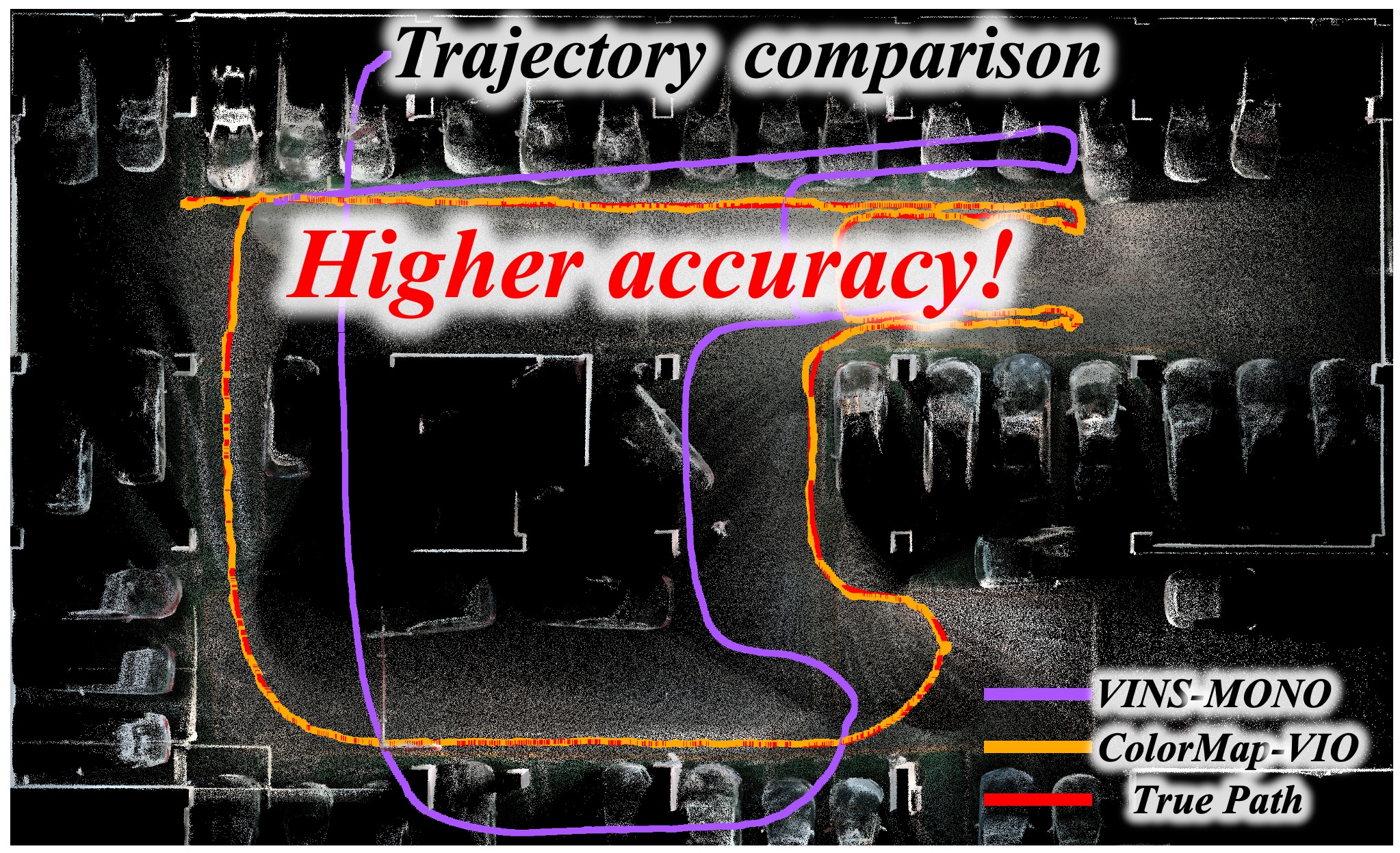
ColorMap-VIO: A Drift-Free Visual-Inertial Odometry in a Prior Colored Point Cloud Map
Jie Xu, Xuanxuan Zhang, Yongxin Ma, Yixuan Li, Linji Wang, Xinhang Xu, Shenghai Yuan, Lihua Xie
IEEE Robotics and Automation Letters 2026
LiDAR-Link: Observability-Aware Probabilistic Plane-Based Extrinsic Calibration for Non-Overlapping Solid-State LiDARs
Jie Xu, Song Huang, Shuxin Qiu, Lijun Zhao, Wenlu Yu, Mingxing Fang, Minhang Wang, Ruifeng Li
IEEE Robotics and Automation Letters 2024
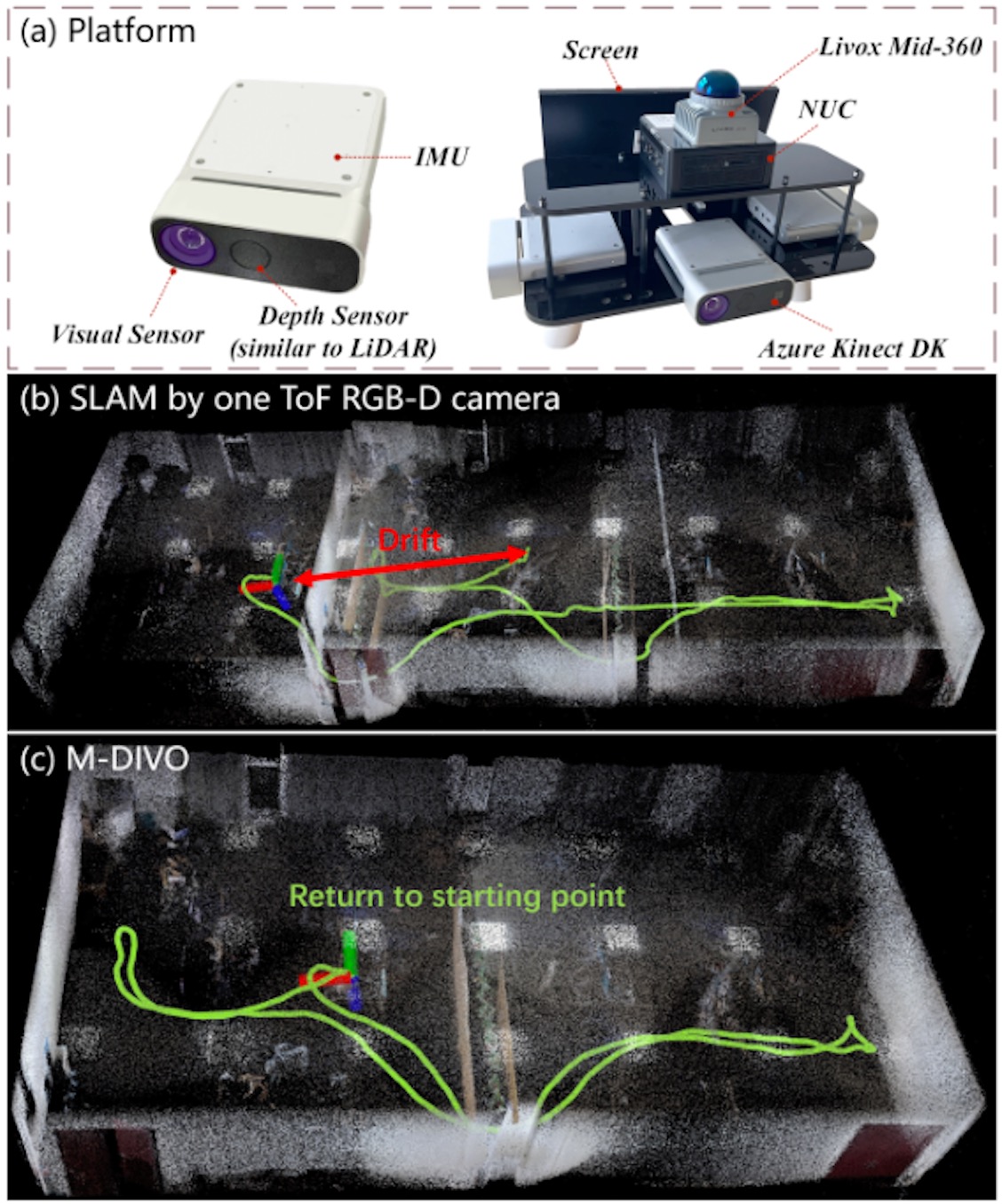
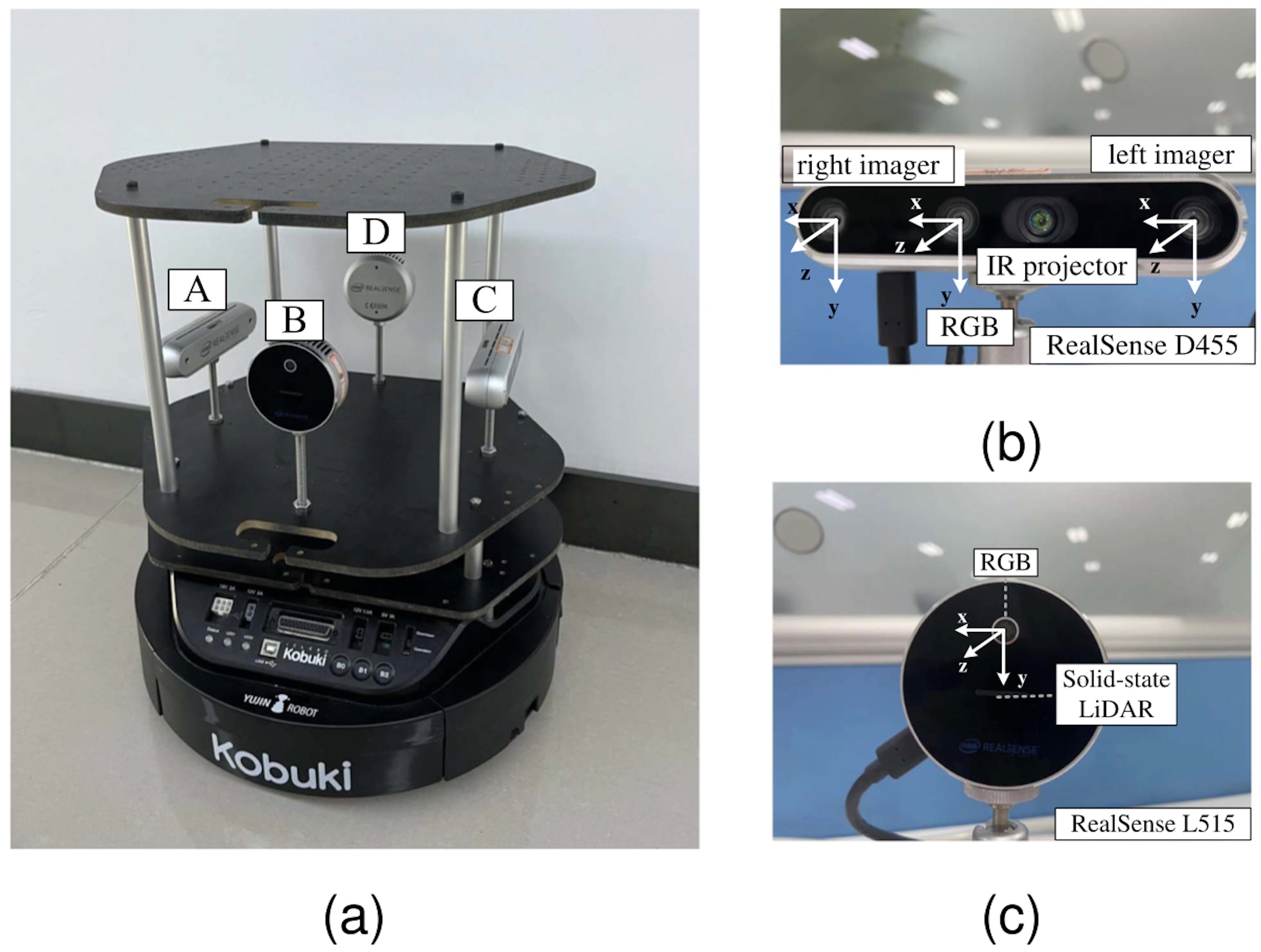
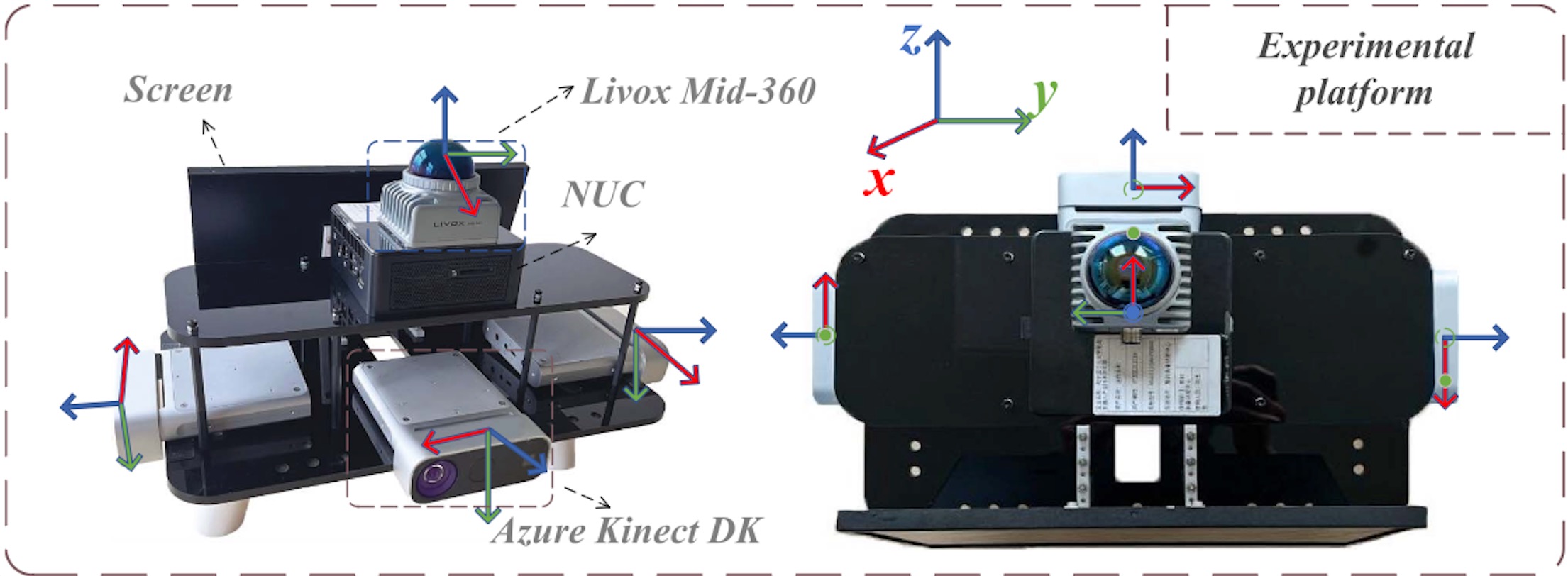
M-DIVO: Multiple ToF RGB-D Cameras-Enhanced Depth–Inertial–Visual Odometry
Jie Xu, Wenlu Yu, Song Huang, Shenghai Yuan, Lijun Zhao, Ruifeng Li, Lihua Xie
IEEE Internet of Things Journal 2024
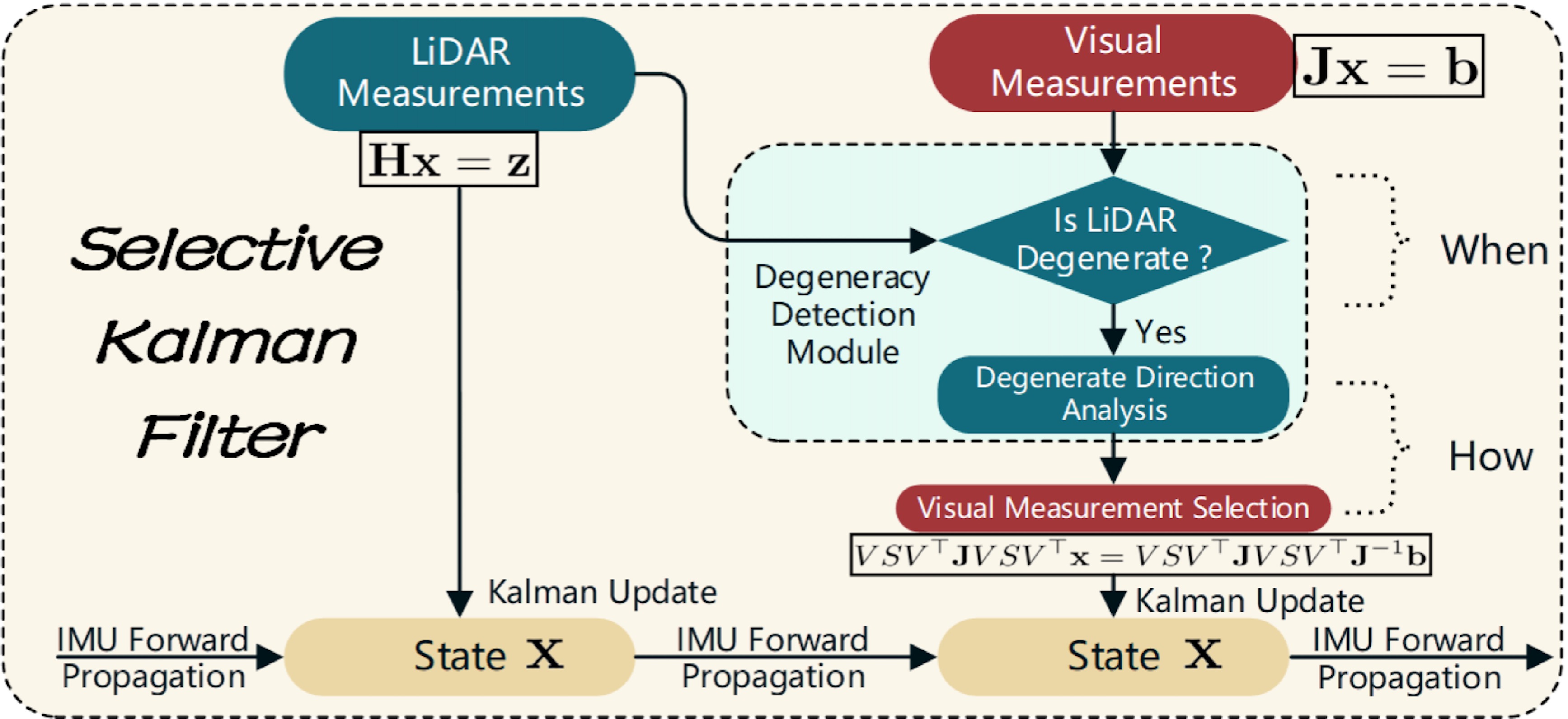
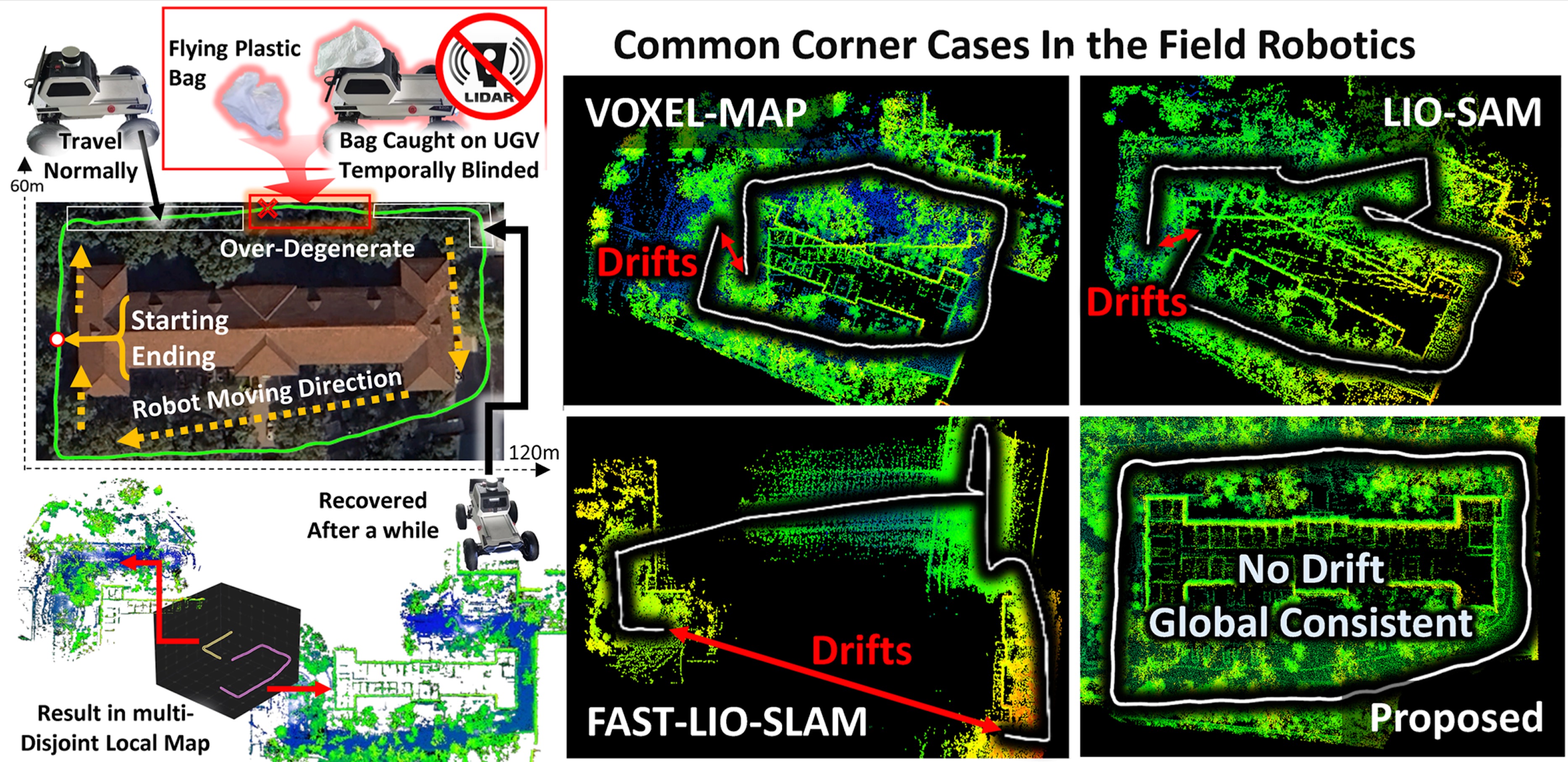
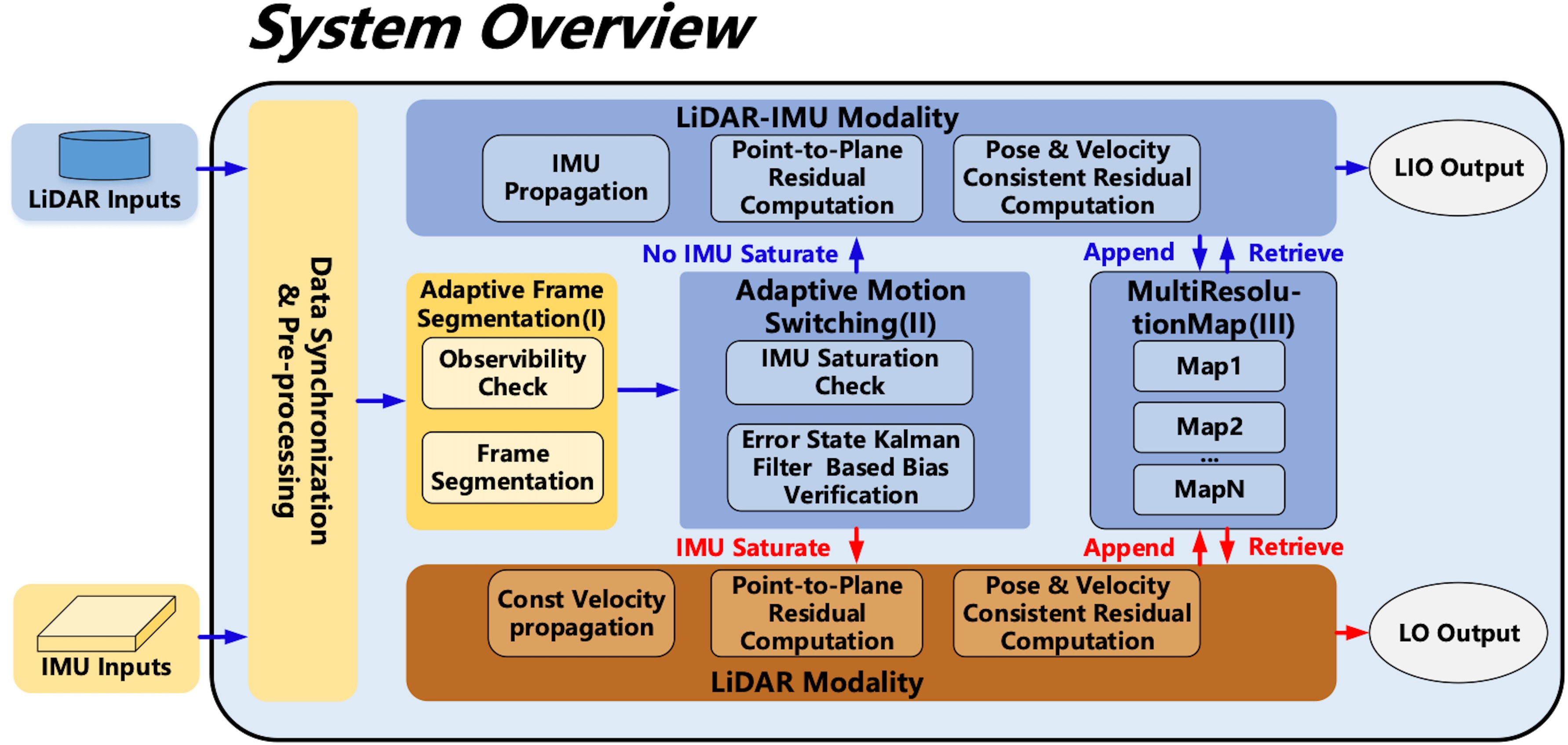
Selective Kalman Filter: When and How to Fuse Multi-Sensor Information to Overcome Degeneracy in SLAM
Jie Xu, Guanyu Huang, Wenlu Yu, Xuanxuan Zhang, Lijun Zhao, Ruifeng Li, Shenghai Yuan, Lihua Xie
arXiv preprint arXiv:2412.17235 2024