Publications
A collection of my research work.
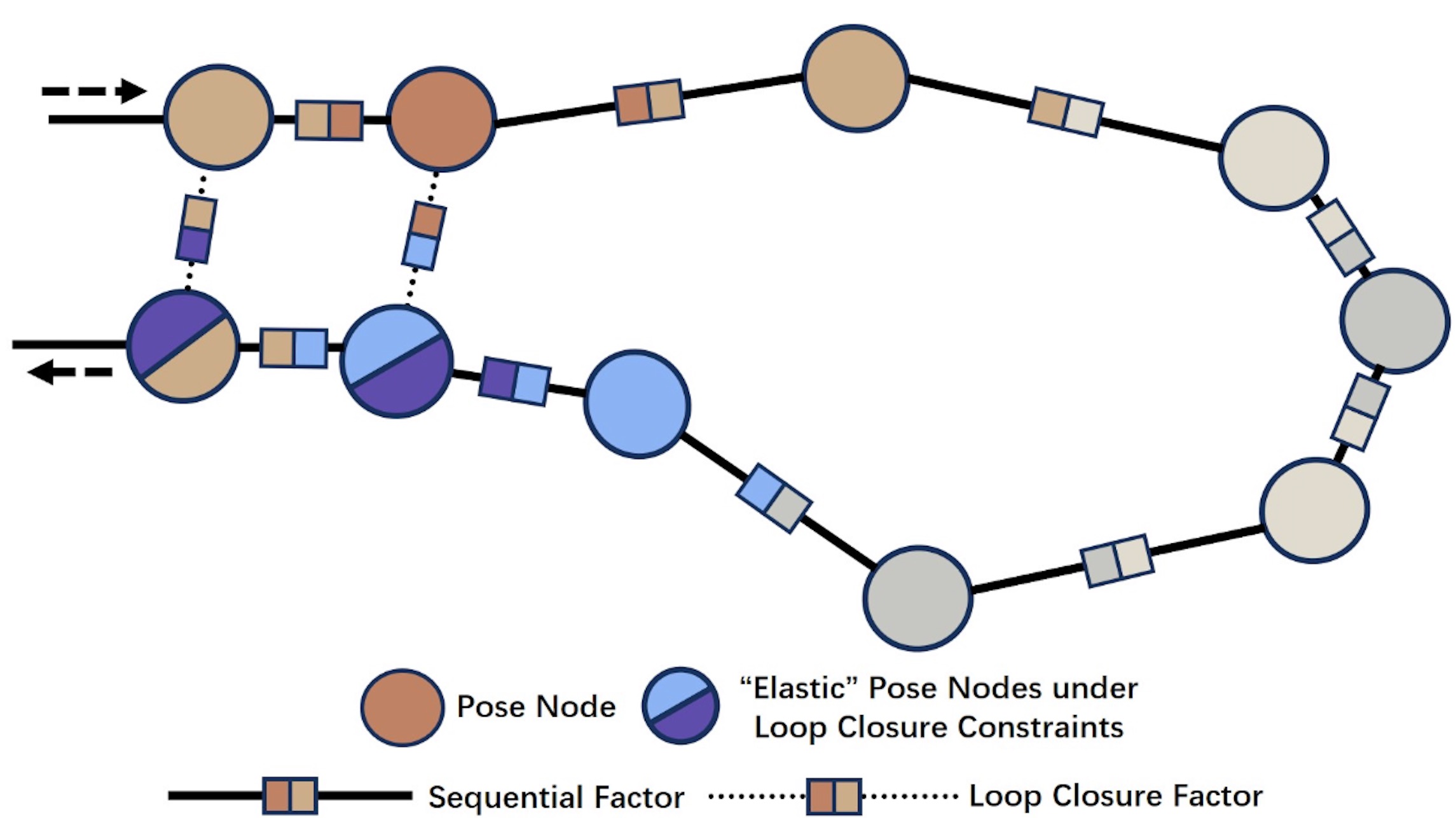
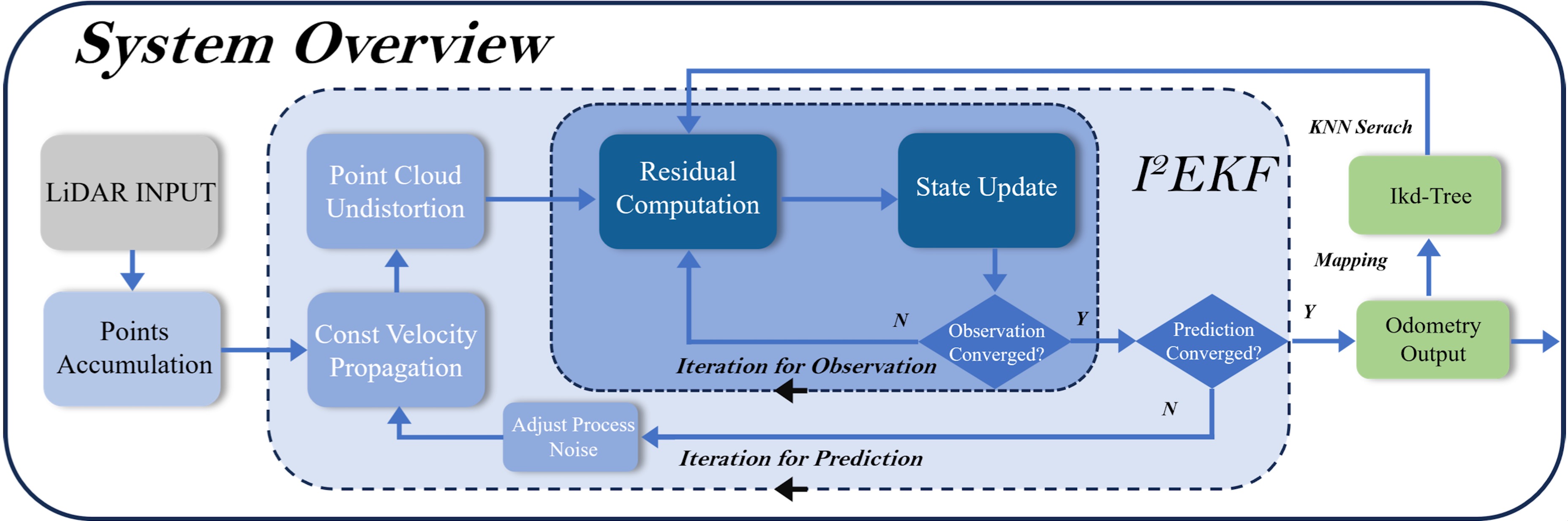
UAPGO: Uncertainty-Aware Pose Graph Optimization for LiDAR-Based SLAM Systems
Tian Zhi, Jie Xu (Co-first), Yongxin Ma, Wenlu Yu, Shenglan Liu, Shenghai Yuan
Yongxin and Yu, Wenlu and Liu, Shenglan and Yuan, Shenghai, Uapgo: Uncertainty-Aware Pose Graph Optimization for Lidar-Based Slam Systems 2026
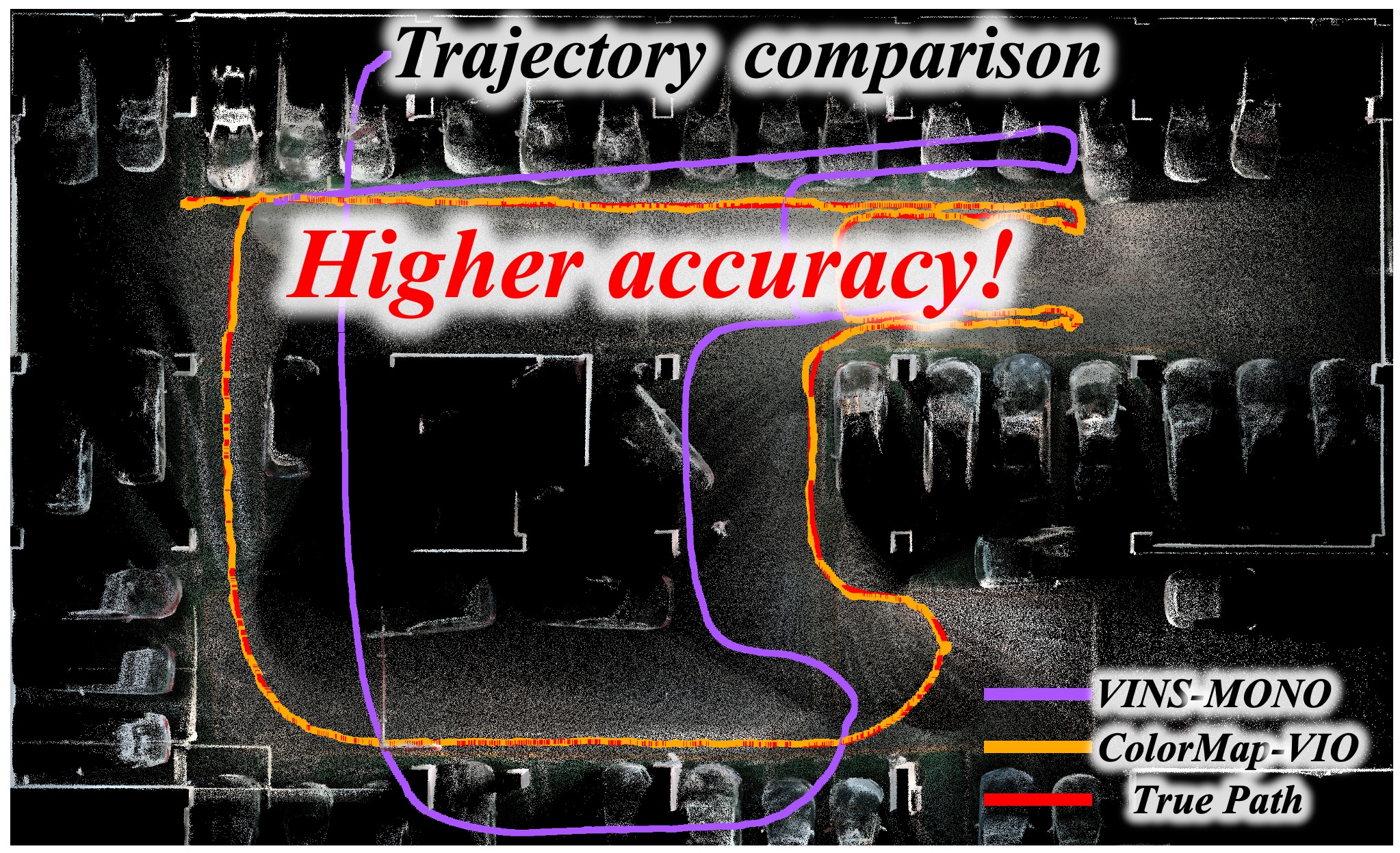
ColorMap-VIO: A Drift-Free Visual-Inertial Odometry in a Prior Colored Point Cloud Map
Jie Xu, Xuanxuan Zhang, Yongxin Ma, Yixuan Li, Linji Wang, Xinhang Xu, Shenghai Yuan, Lihua Xie
IEEE Robotics and Automation Letters 2026
LiDAR-Link: Observability-Aware Probabilistic Plane-Based Extrinsic Calibration for Non-Overlapping Solid-State LiDARs
Jie Xu, Song Huang, Shuxin Qiu, Lijun Zhao, Wenlu Yu, Mingxing Fang, Minhang Wang, Ruifeng Li
IEEE Robotics and Automation Letters 2024
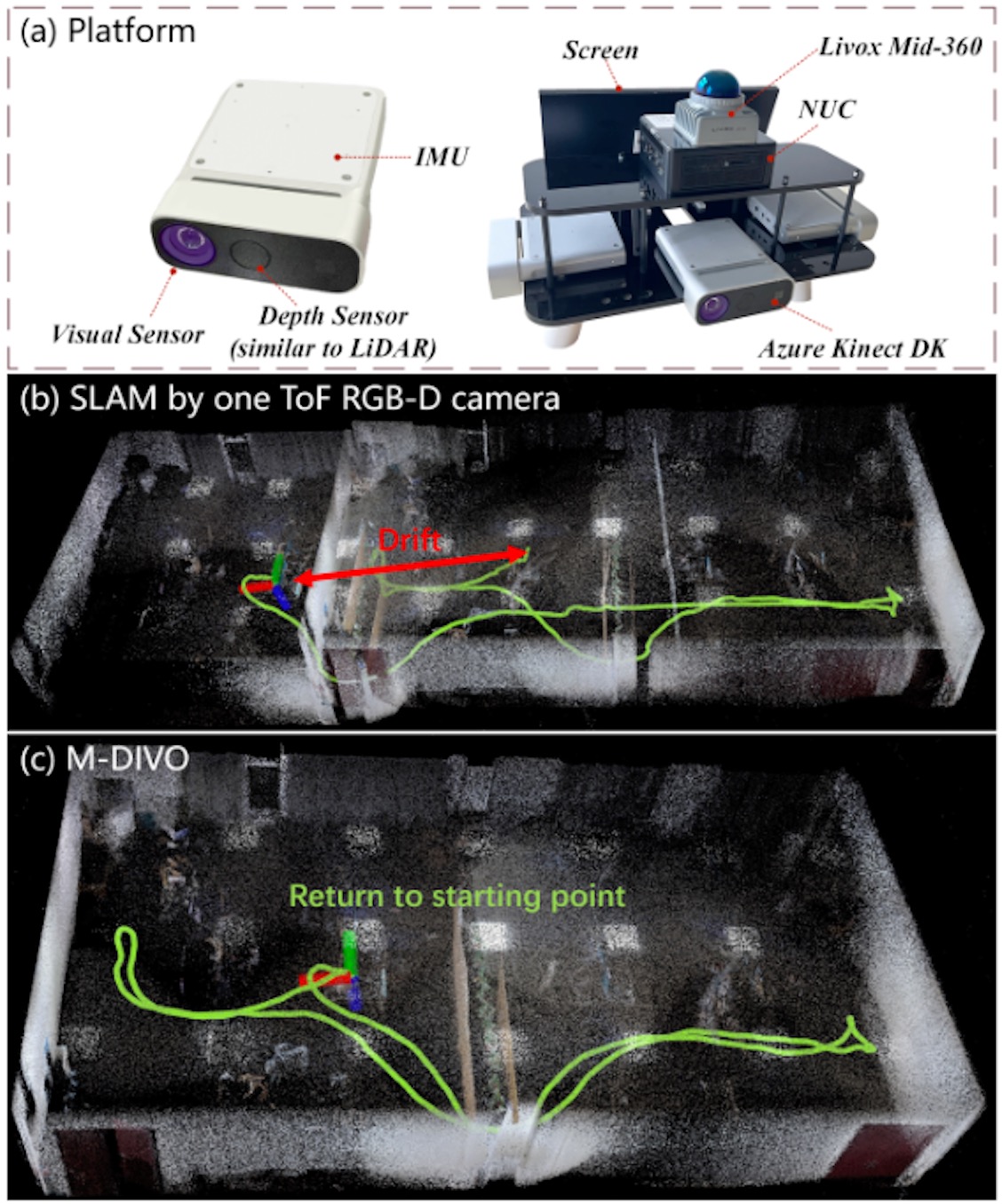
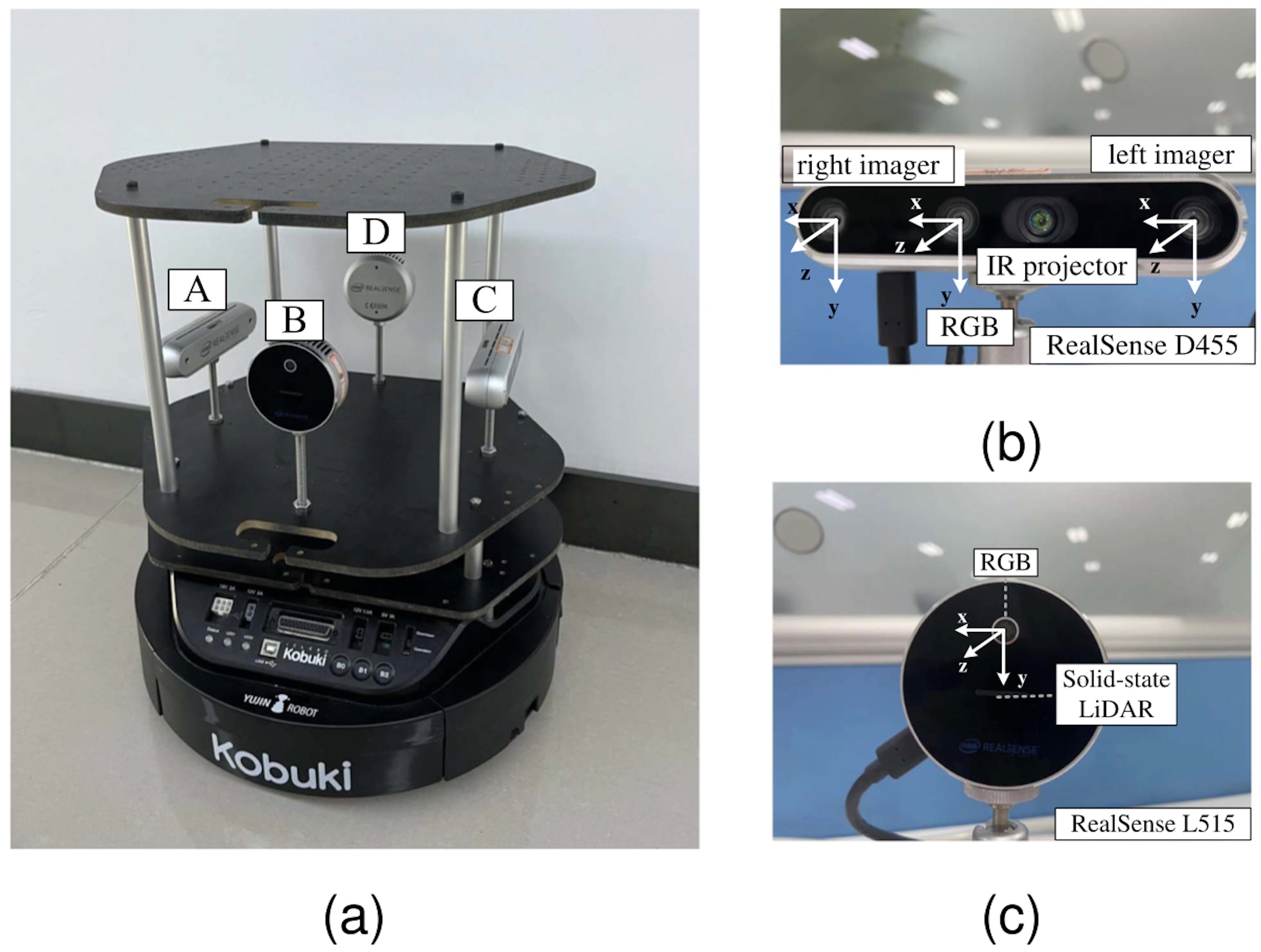
M-DIVO: Multiple ToF RGB-D Cameras-Enhanced Depth–Inertial–Visual Odometry
Jie Xu, Wenlu Yu, Song Huang, Shenghai Yuan, Lijun Zhao, Ruifeng Li, Lihua Xie
IEEE Internet of Things Journal 2024
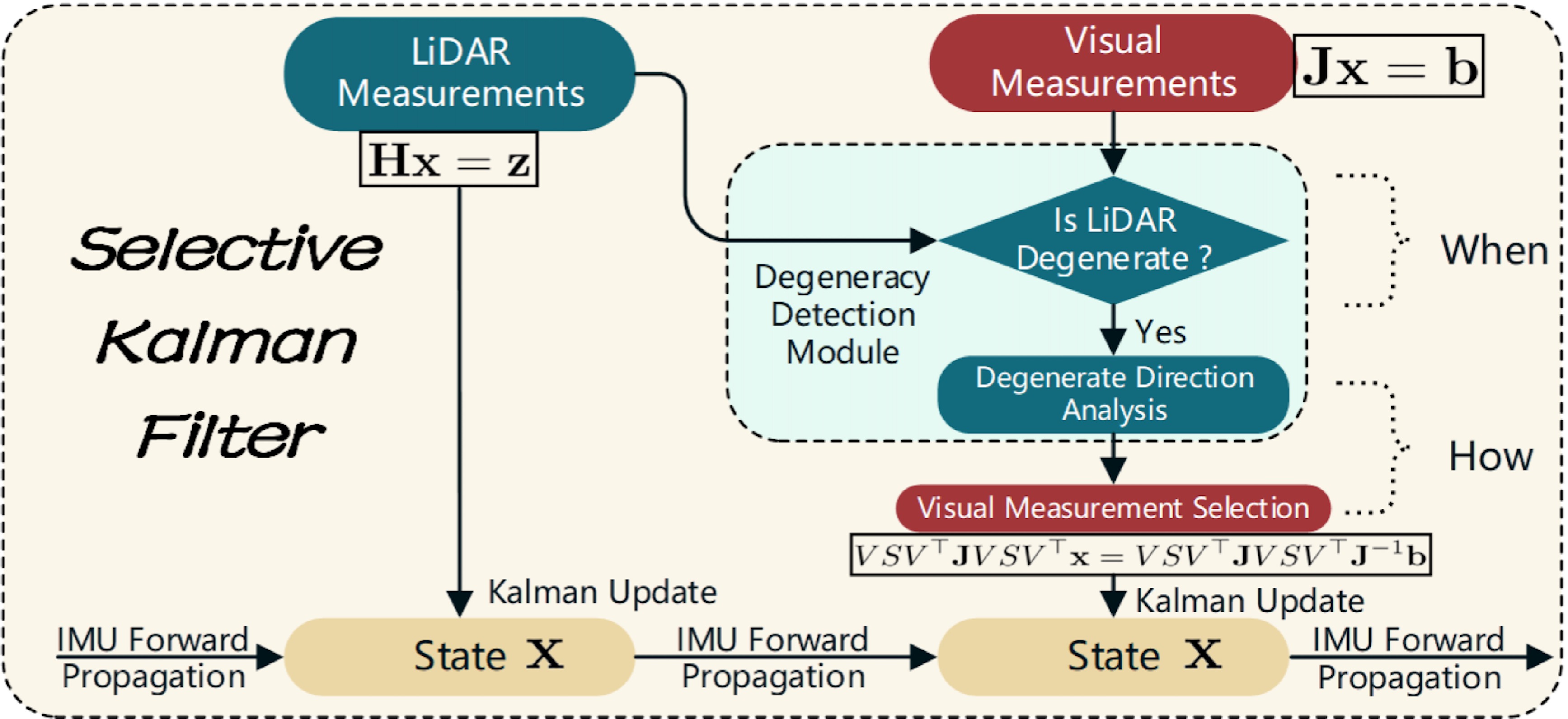
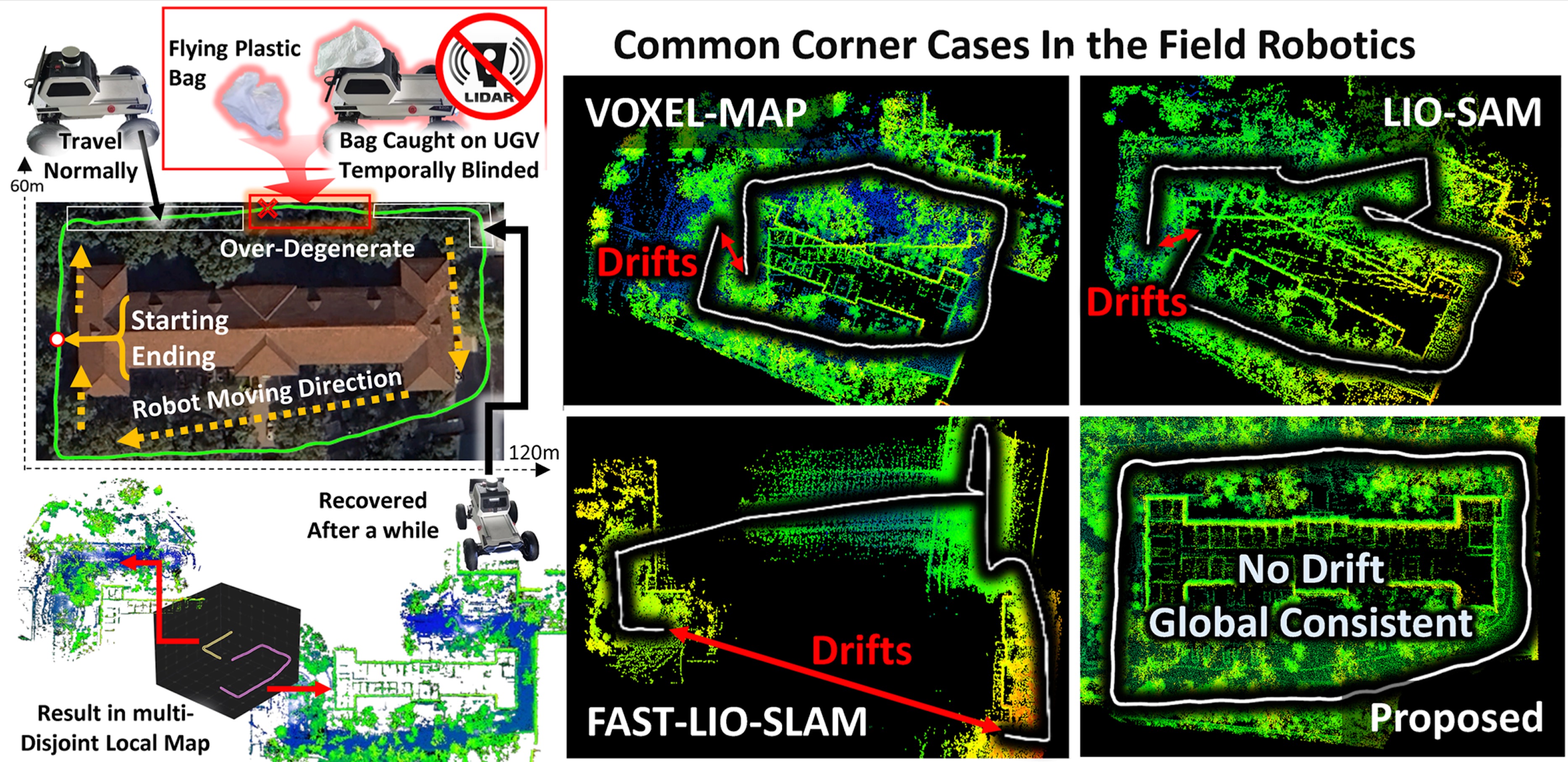
Selective Kalman Filter: When and How to Fuse Multi-Sensor Information to Overcome Degeneracy in SLAM
Jie Xu, Guanyu Huang, Wenlu Yu, Xuanxuan Zhang, Lijun Zhao, Ruifeng Li, Shenghai Yuan, Lihua Xie
arXiv preprint arXiv:2412.17235 2024